Lamprey is available on Amazon!....click here.
Replacement magnets available on Amazon!...click here
When using the sensor with a Talon SRX you must remove the Rx and Tx lines from your ribbon cable. For some reason the SRX will cause the Lamprey to reboot unpredictably when these lines are connected. We're investigating the cause but for now this is the best fix.
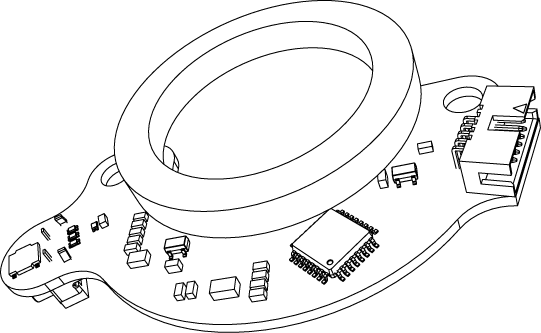
A 10-bit absolute encoder specifically designed with a large hollow bore. This sensor is great for swerve drive steering axis applications or anywhere you need to directly measure your output without being at the shaft end.
The sensor comes in kit form and includes the sensor board, magnet and 10-pin cable. The supplied magnet target has an ID of 1.23" and is designed to pilot on the flange of a standard 1/2" bearing. Glue it to any rotating surface or 3D print a custom hub.
Features
-Custom large bore magnet target
-Wide axial sensing range...0.15"-0.5"
-Configurable analog output voltage
-Multiple output sources
-Magnet and hall sensor user-calibration for increased performance
Output - All outputs generated simultaneously
-10-bit Analog, 3.3v or 5v
-10-bit PWM, 1000uS-2000uS
-UART, 5v
Input
-5v
Advanced User Features
-The sensor supports both 5v and 3.3v analog outputs. To change between the two options triple click the button. A solid blue LED indicates 3.3v out and a solid green LED indicated 5v out.
-Push and hold the button for one second to set a new zero point. The red LED will flash briefly when the sensor crosses this point.
-Push and hold the button at start-up to erase any calibrations performed and restore factory defaults
-The sensor generates a UART stream that can be accessed using an FTDI-USB cable or directly with a 5v logic level micro like an Arduino Uno.
The UART stream defaults to floating point absolute position in degrees. You can change the outputs and other sensor features by sending the following commands into the sensor via a Serial terminal.
d - output in degrees (default)
r - output in radians
a - verbose output showing several system variables
5 - 5v analog output
3 - 3.3v analog output
0 - Set zero point
f - Apply FIR filtering to the output
F - turn off filtering
.jpg)